Self-Charging Smart Car
Abstract
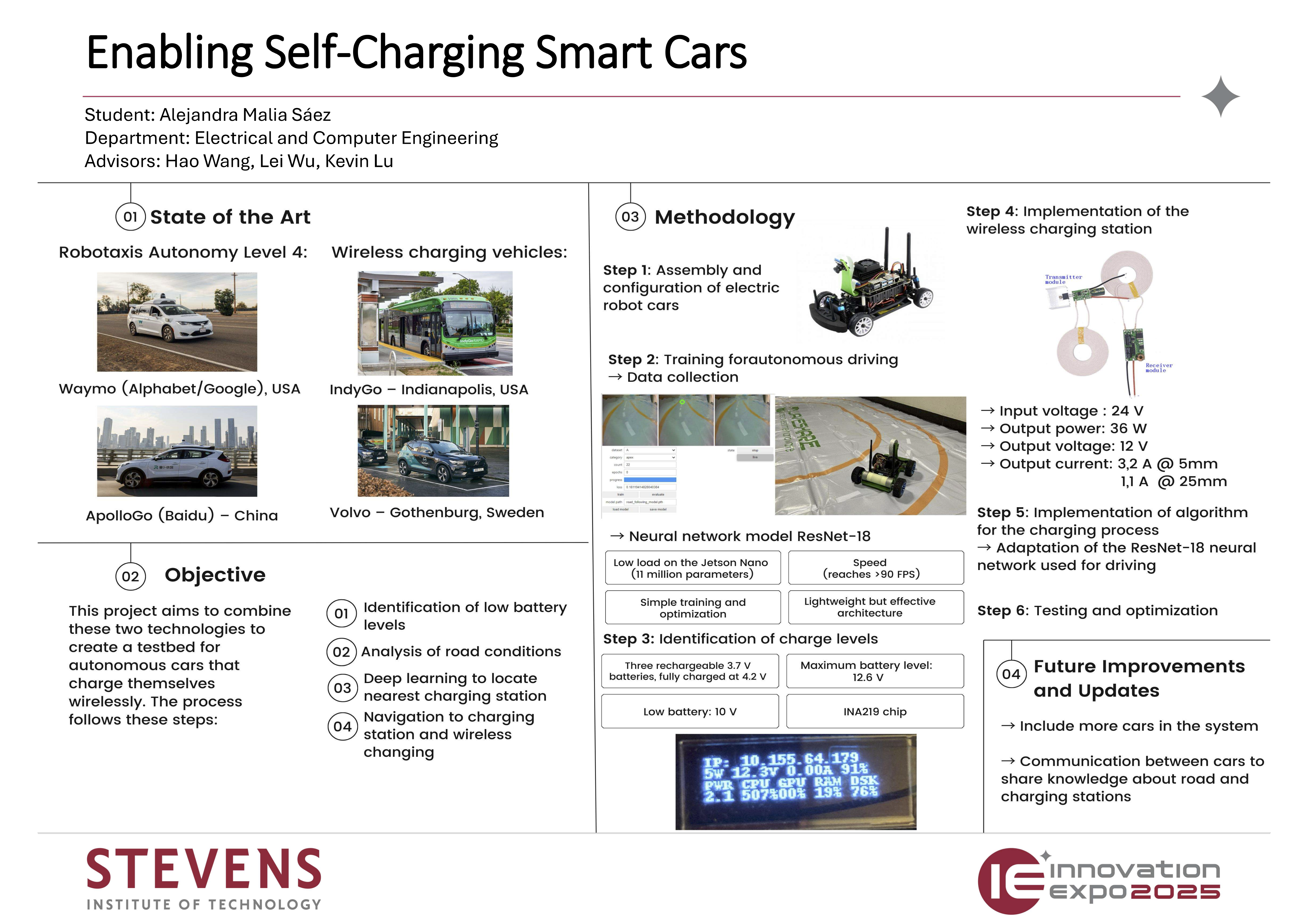
The development of electric autonomous vehicles (EAVs) has transformed the transportation industry into a more efficient, safe and sustainable option. Current approaches to energy management of EAVs often rely on manual intervention. The vehicle informs the operator that the battery is low, and a person must plug the car into the power supply. So much for an autonomous car.
To address this challenge, the present project aims to design a system for the vehicle to autonomously detect low battery levels, analyze real-time road conditions, and identify the nearest wireless charging station. Using a combination of deep learning algorithms, the vehicle will navigate efficiently to the changing station, minimizing energy consumption and ensuring optimal performance.
This project focuses on building a real-world testbed that consists of battery-powered robot cars equipped with essential hardware components, including a Raspberry Pi or NVIDIA Jetson chip, an RGB camera and the necessary control systems. The system aims to improve the performance of smart cars in terms of energy management and navigation to improve their autonomy and reliability.